车型解析用户原地双击拨杆来激活智驾系统

自动驾驶时候发展了这样多年,最大的变化是什么?
在写下这篇著作的前一天,两位汽车行业一又友来到爱范儿,和咱们坐下聊了聊。聊到的实质有好多,从居品扩充到行业趣闻,而自动驾驶行为行业热议的一个分支,当然也成为了咱们磋议的焦点之一。
转头自动驾驶这些年来的发展,变化其实有不少,包括传感器的迭代、车端算力的普及、从高精舆图过渡到占用集聚等。但在这些变化中,最引东说念主注指标冲突当属大模子的加入。
大模子,让自动驾驶时候的应用,变得垂手而得。

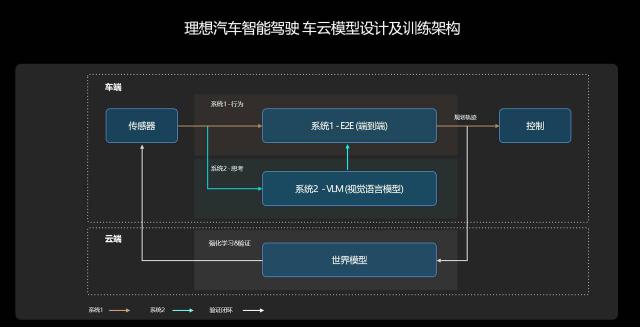
10 月 23 日,理想汽车全新一代双系统智能驾驶解决有揣摸打算「端到端 +VLM」厚爱开动全量推送,理想汽车的智能驾驶,从此步入了 AI 大模子的期间。
像东说念主一样想考,像东说念主一样驾驶,如今的理想汽车,正在结束这一愿景。
好梗阻易搞懂了端到端,VLM 又是什么?
对于端到端到底是什么?是从哪个「端」到哪个「端」?别说无为蹧跶者了,就连不少媒体从业者都莫得搞明晰。
不少厂商都曾对此作念出过讲解,其中讲解得最阳春白雪的,照旧理想汽车:
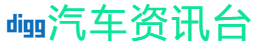
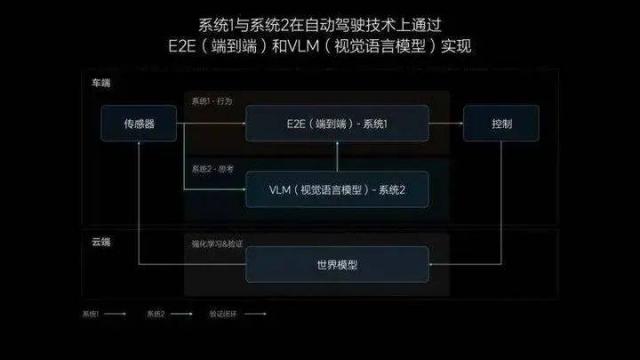
一端,是传感器:录像头、激光雷达等传感器,它们就像是东说念主的眼睛,负责输入环境信息。此外还有卓越遐想的输入信息,如车辆的位置、位姿和导航等信息。
另一端,是行驶轨迹:接收了来自传感器的信息后,系统会输出「动态禁止物」、「说念路结构」、「占用集聚 Occ」和「规画轨迹」。前三个感知任务主要通过屏幕呈现给用户,第四个「行驶轨迹」,便是咱们最终需要从传感器映射出来的东西。
▲理想智驾端到端架构图
不难发现,从传感器接收信息,到系统输出行驶轨迹这个流程,和咱们我方开车特殊访佛——咱们的眼睛负责接收信息,双手会当关联词然地带动处所盘,把车辆带到正确的轨迹上。
是的,依靠端到端模子,理想新一代智驾系统作念到了像东说念主一样驾驶。

一直以来,不管是主机厂照旧自动驾驶企业,都在延续宣传自家的智驾系统有何等类东说念主,何等像「老司机」。关联词,一些「老司机」们习以为常的场景,在很长一段时辰里,都是难以解决的行业艰难。
最典型的便是环岛这一场景,因为场景复杂、感知受限,因此在本年 7 月之前,还莫得几家车企能够结束「老司机」般的收支环岛。

理想智驾时候研发负责东说念主贾鹏曾对爱范儿和董车会示意,对于感知和规控分离的分段式智驾有揣摸打算来说,在环岛场景里,感知模子需要为规控模子作念「各式万般的假定。」
作念个掉头,还得把掉头线拟合出来,不同的路口的掉头还不太一样,曲率都不太一样,是以你很难作念到一套代码就不错把总共环岛掉头处分,种类太多了。
一样式的端到端有揣摸打算则不同,其具备更强的复杂说念路结构的剖释智商,不错愚弄东说念主类驾驶员数据检修出不同的环岛类型、不同出进口的收支轨迹,自主遴选顺应的行进阶梯。
如斯一来,原有的说念路拓扑和东说念主工界说的规矩,就再是必须的了。
对于环岛这件事,贾鹏还共享过一个「好玩的故事」。
在咱们(的模子数据包含)大约 80 万 clips(视频片断)的时候,还过不了环岛,自后倏得有一天发现咱们(喂了)100 万 Clips(之后)它我方能过环岛,我以为是 100 万(视频片断)里头刚好有一些环岛数据放在内部了。
「模子如实很蛮横,」贾鹏补充说念,「你喂了什么数据他就能学会,这是模子的魔力所在。」

理想如今推出的全量版块基于 V4.8.6 模子,后者是在 400 万 clips 的基础上迭代的第 16 个版块。和以往比拟,新模子对于超车场景和导航信息的剖释智商得到普及,同期,禁止物的检测愈加精确,绕行的幅度也更为合理。
因此不仅是环岛,像 U 型掉头、拥挤时的蠕行和博弈、十字街头等传统复杂场景,如今的「端到端 +VLM」智驾系统,都能够很好地自主处理,以致还支捏 P 档激活——
在路边泊车时,用户原地双击拨杆来激活智驾系统,毋庸再像往日一样,必须在车说念内智力激活。
先容完端到端模子的智商,接下来便是 VLM 模子。
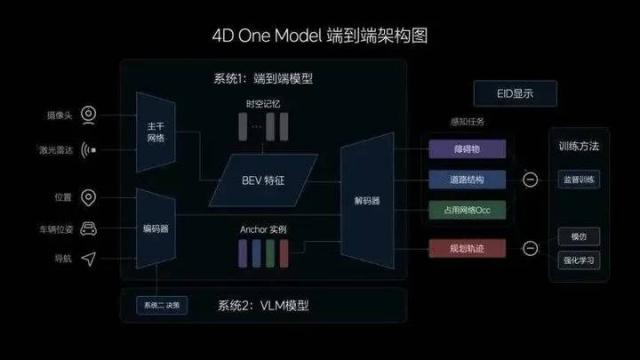
VLM 模子是一种视觉言语模子,理想是第一个将视觉言语模子得手部署在车端芯片的厂商,使自动驾驶具备了未知场景的逻辑想考智商。
也便是说,它能够像东说念主一样想考。
举个例子,能够生成行驶轨迹的端到端模子,皆备具备通过收费站的智商,但它在濒临收费站时,并不是很明晰我方应该走哪条说念,临了只可已然挑一条来走。
而 VLM 模子,则能够像东说念主类一样剖释物理寰宇的复杂交通环境和汉文语义,不错明晰地区分 ETC 车说念和东说念主工车说念,并扶持端到端模子作念出正确的决策。

访佛的场景其实还有好多,如公交车说念和潮汐车说念的识别、学校路段等路牌的识别、主辅路的收支等。不仅如斯,在碰到施工厂景、坑洼路面以致是减慢带时,VLM 模子也能很好地剖释,进行领导和降速。
限制现在,理想汽车的 VLM 视觉言语模子如故领有了 22 亿的参数目,对物理寰宇的复杂交通环境具有更拟东说念主的剖释智商。
此外,在 OTA 6.4 版块中,高速 NOA 功能也得到了优化,在高速 & 城市快速路场景中,系统不错更早地识别前哨慢车,超车动作愈加高效安全。
一言以蔽之,在端到端 +VLM 双系统的匡助下,如今面向用户的 OTA 6.4,其拟东说念主化进度上到了一个新的台阶。
理想的「快」与「慢」
从时候架构来看,理想汽车这两年资格了三次比较大的退换。
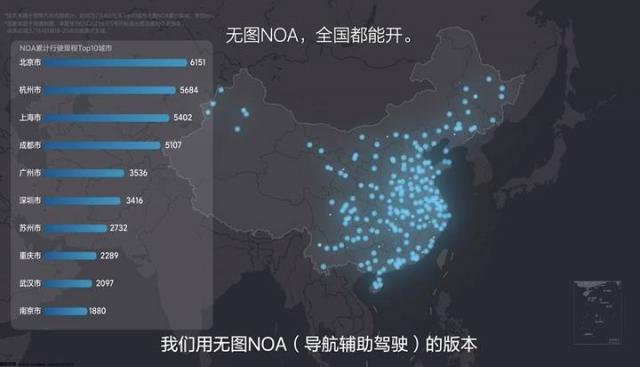
从需要先验信息的 NPN 集聚,再到基于 BEV 和占用集聚的无图 NOA,再到如今的一体化端到端时候阶梯。
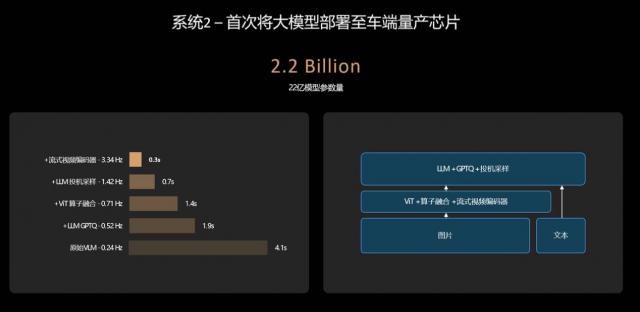
第一代 NPN 架构比较复杂,包含了感知、定位、规画、导航、NPN 等模块,它们共同复古起了理想汽车那时 100 城的城市 NOA 推送。
第二代无图 NOA,理想汽车引入了端到端大模子,模块数目大幅缩减,只剩下了感知和规画,不再需要恭候先验信息的更新。
理想的这一步,让车企的「卷」,不再局限于败兴的开城数目,信得过结束了有导航就能开。
本年 5 月,理想汽车招募了 1000 位用户,厚爱开启了无图 NOA,也便是 AD Max 3.0 的公测。那时的用户反应,远远超出了理想汽车的预期,短短两个月后,理想汽车就为 24 万多位理想 AD Max 用户推送了此次升级。
只不外,这个时候的端到端,照旧一个分段式的端到端,第三代智驾有揣摸打算,才是信得过道理上的一样式端到端——从输入到输出,全部由一个模子结束,中间莫得任何规矩的参与。
在以往,不管是有图有揣摸打算照旧无图有揣摸打算,都依赖工程师凭据各式万般的说念路场景去编写规矩,力争穷举总共说念路现象和与之对应的有揣摸打算,让智驾的限度尽可能地广。
常常来说,厂商会把场景约略分为三种:高速场景、城区场景和泊车场景。这几大场景又不错赓续细分,规控工程师们则需要针对这些场景来编写代码。
但濒临长短不一的实验寰宇,这样的作念法彰着不够实验。而一样式端到端,则不错学习东说念主类开车的流程,接收传感器信息后,径直输出行驶轨迹。

有莫得发现,这个时候,普及智驾智商最遑急的要素,从工程师造成了数据。而理想,最不缺的便是数据。
10 月 14 日,理想汽车迎来了第 100 万辆整车在江苏省常州基地下线,中国首个百万辆新势力车企就此降生。凭据理想汽车公布的数据,在 30 万元以上的理想车型中,AD Max 用户的比例,高达 70% ——
每过一个月,这些车都能给理想提供十几亿公里的检修数据。
另外,理想很早就意志到数据的遑急道理,打造了对于数据的器具链等基础智商,比如理想的后台数据库结束了一段话查找那时,写一句「雨天红灯住手线隔邻打伞途经的行东说念主」,就能找到相应的数据。
恰是凭借纷乱的检修数据和完善的戒指链,理想智驾结束了在行业中的「自后居上」,用端到端和 VLM 构成了我方的「快」与「慢」。
在理想看来,这套双系统智驾有揣摸打算,访佛于诺贝尔奖取得者丹尼尔 · 卡尼曼在《想考,快与慢》中的快慢系统表面:
东说念主的快系统依靠直观和本能,在 95% 的场景下保捏高成果;东说念主的慢系统依靠专诚志的分析和想考,先容 5% 场景的高上限。
其中,端到端是阿谁「快系统」,而 VLM 当然便是「慢系统」了。
郎咸一又认为,一个自动驾驶系统到底是 L3 级别照旧 L4 级别,并不取决于端到端,VLM 模子才是信得过能去应酬未知场景,拔高智商上限的要津所在。
「理想同学,我要去这里」
除了智能驾驶方面的升级,OTA 6.4 在用户交互方面也引来了修订。
这里相通分为「快」和「慢」两个部分。
行为「快系统」的端到端模子所对应的常常为翰墨弹窗,为驾驶员及时提供导航、交规、成果、博弈等实践逻辑和动作。

对于「慢系统」VLM 视觉言语模子,理想则为它准备了全新的图文视窗。在独特场景下,将前哨感知到的画面投射到页面内,和谐案牍讲授模子的想考流程和终端。

在翰墨弹窗和图文视窗的和谐下,不管系统实践何种车控动作,驾驶员都能提前瞻念察。对于那些首次体验智驾的蹧跶者来说,这种直不雅的信息展示也有助于飞速拓荒他们对智能驾驶系统的信任感。
不得不承认,理想汽车对用户需求的剖释如实特殊精确。
在咱们对于将来的畅想中,智驾和智舱老是绑定在沿途的,在 OTA 6.4 版块中,理想也为它的智能空间带来了不少升级。
最初是新增的任务大家 2.0 全面接入了理想同学和 Mind GPT 的智商,在大模子的加捏下,任务大家的推崇更为智能。
Mind GPT 加捏下的理想同学,不仅能够在周末家庭短途旅行息争答浅近小疑问这两个场景里证据作用,纠合新升级的高德 AutoSDK 750 版块导航舆图,理想同学不错通过「触控 + 语音」的方式,让驾驶员飞速进行指标地搜索。

比如说,指着舆图上的某个位置,让它帮你搜索充电站任一品牌的充电桩,以致还不错指定功率。
总之,全新的理想同学皆备不错让你毋庸提起手机,你不错用最当然直不雅的方式,破绽诞生导航线径。
端到端负责驾驶,VLM 替你想考车型解析,而你只需爽直地指令处所。